Zumo32u4¶
The Zumo32U4 is a hardware development platform includes a built-in Arduino-compatible ATmega32U4 microcontroller, an LCD, encoders for closed-loop motor control, and proximity sensors for obstacle detection. It’s high-performance motors and integrated sensors make it versatile enough to serve as a general-purpose small robot. [1]. Fig. 1 shows the Zumo32u4 Robot.
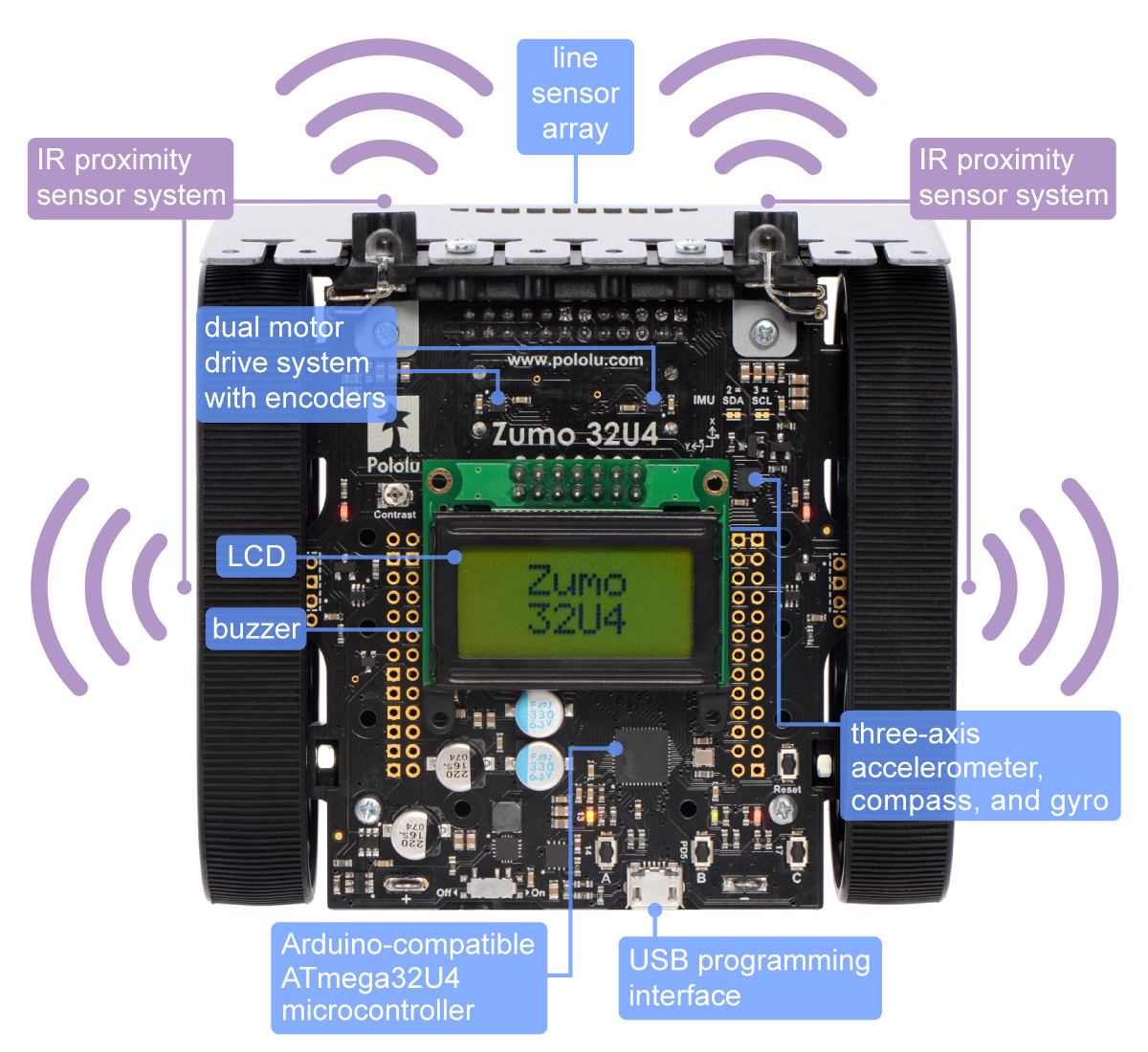
Fig. 1 Zumo32u4 Robot [1]
For the Segway implementation the Zumo32u4’s blades, line sensor array and top most IR Proximity sensors were removed because the Zumo32u4 balances on the edge where the blade is (top edge in Fig. 1). The opposite edge can’t be used because the battery (not visible in the Fig. 1) holder completely sits on the floor.
At the time of writing this documentation there are three different Zumo32u4 robots;
- Zumo32u4 robot with 50:1 HP motors
- Zumo32u4 robot with 75:1 HP motors
- Zumo32u4 robot with 100:1 HP motors
The main difference between the available configurations is the gear ration of the motors. For this project the Zumo32u4 robot with 100:1 HP motors was used.
In the following subsections the relevant Zumo32u4 components will be described in more detail.
| [1] | (1, 2) Pololu. Zumo 32u4 robot. 2017. URL: https://www.pololu.com/category/170/zumo-32u4-robot. |